

CIVIL&ENVIRONMENTAL
ENGINEERING
WEBZINE 2018 Vol.1, No.1Urban Dataset Release for Autonomous Vehicle Researches
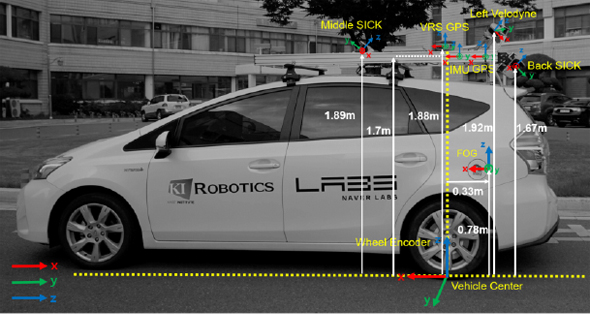
Urban Dataset Release for Autonomous Vehicle Researches- Complex urban environments address many challenging research topics such as multi-lane roads, GPS blocking from high-rise buildings, and abundant dynamic objects and pedestrians. In the collaboration with NAVER LABS, a research team led by Prof. Ayoung Kim recently published an urban dataset targeting the autonomous vehicle researches within the urban environment. To overcome the GPS-denied urban canyon, the team proposed Simultaneous Localization and Mapping (SLAM) based navigation technique thereby collecting sensor data from a multi-modal platform.

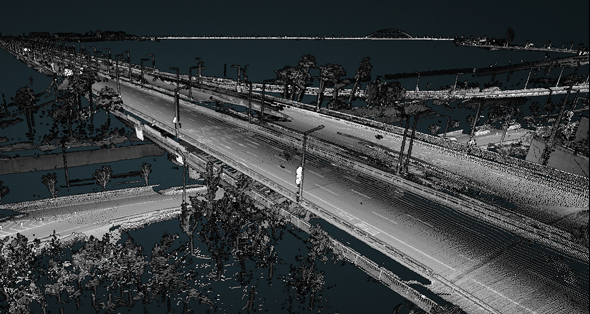
- The dataset provides multi-modal sensor data from LiDARs to cameras, including navigational sensors. In total, four different cities are covered by changing the weather and illumination condition. Via this dataset, researchers can leverage different aspect of the sensor data avoiding the effort in capturing the real sensor measurements. Furthermore, the point cloud data is also provided to aid urban researches in the relation to the smart city researches.
- The topic of this article is published via KmatriX as a research highlight on May 10, 2018
- YouTube link